基于双重相变的快速响应型近红外光驱动软体机器人
作者:余兆函,王云明,郑嘉琦,孙双,符岳,陈丹,蔡微昊,王栋,周华民,李德群 时间:2022-08-02 点击数:
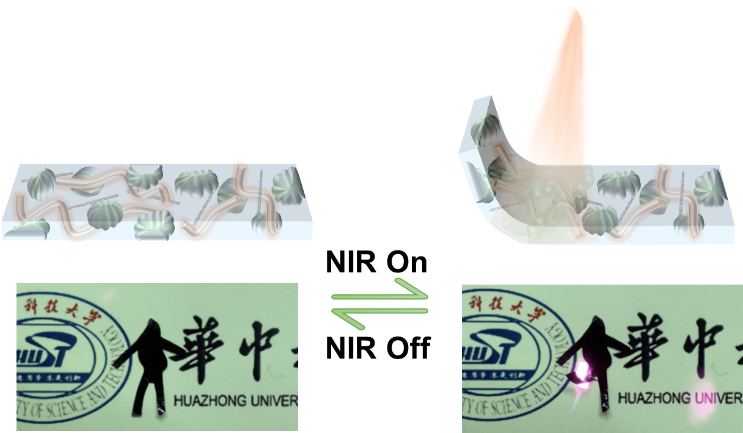
针对传统软体机器人变形受限的难题,通过材料设计,制备了高灵敏的近红外光驱动软体机器人。文中设计合成了一种新型的基于碳纳米管/高弹性高分子/液晶弹性体的复合材料,基于双重相变机理,实现了近红外光下的快速变形响应。所制备的软体机器人能够在808 nm,320 mW的近红外光刺激下,在2 s内在指定部位产生180°的弯曲变形,并在光移除后恢复原形。此外,该软体机器人能光刺激下完成前进、后退、螺旋解开、仰卧起坐等指定动作。
文章访问链接:https://pubs.acs.org/doi/10.1021/acsami.2c01109
